Section 1.20 Conformal Groups
¶Subsection 1.20.1 Conformal Groups
¶Consider the vector
and assume the norm is given by
so that \(V\in\RR^6\) with signature \((4,2)\text{.}\) Assume further that \(V\) is null, that is, that \(|V|=0\text{,}\) and set
How does \(\SO(4,2)\) act on \(v\text{?}\)
The subgroup \(\SO(3,1)\subset\SO(4,2)\) acts as usual on \(T\text{,}\) \(X\text{,}\) \(Y\text{,}\) \(Z\text{,}\) but leaves \(P\) and \(Q\) invariant; thus, \(\SO(3,1)\) also acts as usual on \(v\text{.}\) The boost in the \((P,Q)\)-plane takes \(P+Q\) to
and thus takes \(v\) to a multiple of itself; this transformation is called a dilation. But what about the remaining 8 elements of \(\SO(4,2)\text{,}\) which mix up \((T,X,Y,Z)\) with \((P,Q)\text{?}\)
Consider for example the rotation \(R_X\) in the \((X,P)\)-plane, and the boost \(B_X\) in the \((X,Q)\)-plane. We have
from which the corresponding Lie algebra elements \(r_X\text{,}\) \(b_X\) are easily seen to be
or in matrix form
If we do both transformations at once, we obtain the null rotations
which have the interesting property that their cube is zero. Thus, the corresponding group element is easy to obtain using a power series; we have
or equivalently
which can be combined to yield
These null rotations thus leave one of the null directions \(P\pm Q\) invariant; hence the name.
So what does the null rotation generated by \(r_x+b_x\) do to \(v\text{?}\) We have
with \(y\text{,}\) \(z\text{,}\) \(t\) held fixed; this is a translation in the \(x\)-direction. Translations in the \(y\text{,}\) \(z\text{,}\) and \(t\) directions can be constructed similarly.
What about \(r_x-b_x\text{?}\) Now we have
where
Since we are assuming \(|V|=0\text{,}\) we can replace \(P^2-Q^2\) by \(T^2-X^2-Y^2-Z^2\text{,}\) so that
and therefore
A conformal translation of \(v\) along \(a\) is defined by
where
for \(|v|\ne0\text{.}\) 1 Comparing (1.20.17) with (1.20.16) shows that the latter is just the conformal translation of \(v\) in the (negative) \(x\)-direction. Conformal translations in the \(y\text{,}\) \(z\text{,}\) and \(t\) directions can be constructed similarly.
In summary, there is a nonlinear action of \(\SO(4,2)\) on vectors \(v\) in \(3+1\)-dimensional Minkowski space, which is associated with transformations that preserve the inner product up to scale. Such transformations are known as conformal transformations, and \(\SO(4,2)\) is referred to as the conformal group of \(3+1\)-dimensional Minkowski space. More generally, we refer to \(\SO(4,2)\) as the conformalization of \(\SO(3,1)\text{;}\) the same construction can be applied to any orthogonal group. Conformalization adds two new degrees of freedom to the representation, thus adding an internal symmetry \(\SO(1,1)\) (the dilation), together with one translation and one conformal translation (the two sets of null rotations) for each existing degree of freedom.
Subsection 1.20.2 \(E_7\) as the Conformal Group of \(E_6\)
¶Recall that the minimal representation of \(\ee_6\) is the Albert algebra \(\bH_3(\OO)\text{,}\) and that
Thus, whereas \(\so(3,1)\) acts on a 4-dimensional vector space, \(\ee_6\) acts on a 27-dimensional space. Applying the same “conformalization” construction as above, we expect to obtain a new \(\so(1,1)\) symmetry, together with 27 translations and 27 conformal translations. Sure enough,
and this construction does indeed turn out to generate \(\ee_7\) from \(\ee_6\text{.}\) This Lie algebra decomposition of \(\ee_7\) is represented symbolically by writing
where we have identified the real forms in our construction as belonging to the half-split magic square.
However, there is an important difference between “conformalization” as applied to the \(2\times2\) and \(3\times3\) magic squares, which we here merely summarize. One way to see this difference is to rewrite the construction explicitly in terms of two division algebras, noting that conformalization corresponds in both cases to the transition from the second row to the third. It is however more common to use larger matrices rather than explicit split quaternions. In the \(2\times2\) case, we can combine a vector \(\XX\) and our new degrees of freedom \((p,q)\) into a \(4\times4\) matrix of the form
where \(\tilde\XX=\XX-\tr\XX\) as usual denotes trace reversal. There is a duality operation that allows \(\PP\) to be rewritten as a completely antisymmetric matrix. The elements of the conformalized algebra (e.g. \(\so(4,2)\)) can also be expressed as \(4\times4\) matrices, of the general form
where \(\Phi\) is in the original algebra (e.g. \(\so(3,1)\)), so that \(\tr(\Phi)=0\text{,}\) \(\rho\in\RR\) is the dilation, and the Hermitian matrices \(A\) and \(B\) are the translations and conformal translations, respectively. Although (1.20.23) generalizes directly to the \(3\times3\) case, with \(\phi\in\ee_6\text{,}\) \(\rho\in\RR\text{,}\) and \(A,B\in\bH_3(\OO)\text{,}\) (1.20.22) does not.
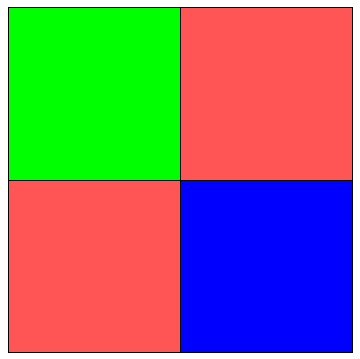
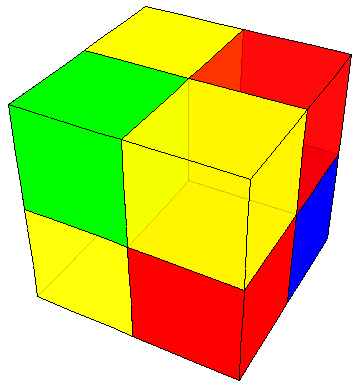
The issue is that, in the \(2\times2\) magic square, \(\PP\) is (reinterpreted as) a completely antisymmetric matrix, a rank 2 tensor. In the \(3\times3\) magic square, we must replace \(\PP\) by a completely antisymmetric rank 3 tensor. We can think of this process as replacing a square by a cube, as shown in (((Unresolved xref, reference "blocks"; check spelling or use "provisional" attribute))) . The square corresponds to \(\PP\text{,}\) with two real degrees of freedom on the diagonal (\(p\pm q\)), and one vector degree of freedom on the off diagonal (\(\XX\)). In a cube, we still have two real degrees of freedom on the main diagonal, but there are now two independent sets of vectors, in three copies each, filling out the cube. This geometric description correctly explains the fact that the minimal representation of \(\ee_7\) is given by a pair of real numbers \(p\pm q\text{,}\) together with two elements \(\XXX,\YYY\in\bH_3(\OO)\text{.}\) The collection \((p+q,p-q,\XXX,\YYY)\) is called a Freudenthal triple system, and has dimension \(1+1+27+27=56\) as a vector space.